
660 reads
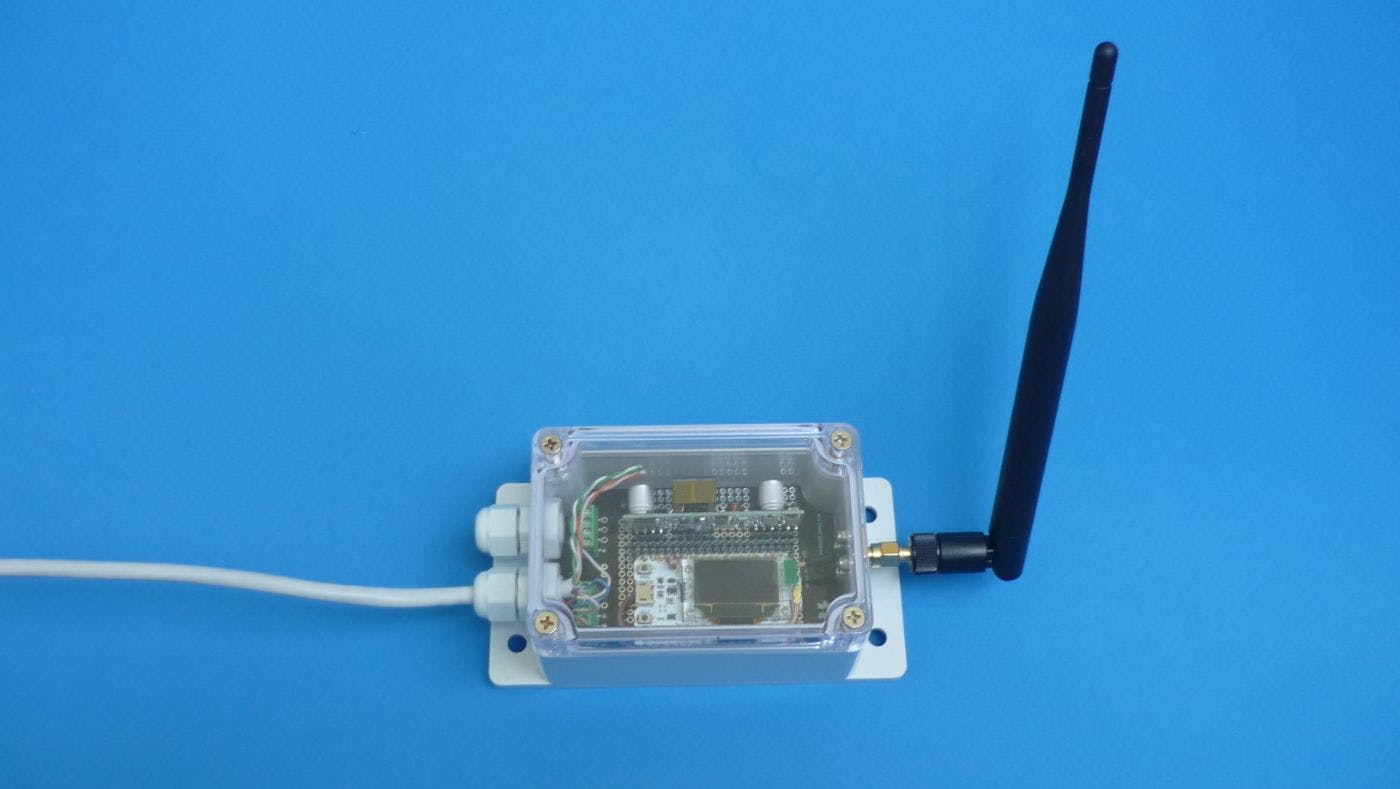
DIY Wi-Fi Sensor — No Programming or Soldering Required
by
February 28th, 2023







Story's Credibility



Story's Credibility
About Author

Electronics projects, Open source & Open hardware
Comments

TOPICS





Related Stories







Arduino, Meet Splunk

Oct 12, 2018
Arduino, Meet Splunk
Oct 12, 2018